





|
Moduł sterowania silniczkiem krokowym; sterownik silnika krokowego |
Połączenie silników na foto w galerii
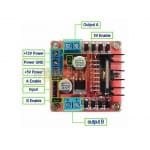
Moduł smart MOTOR to sterownik obciążeń indukcyjnych (np. silników) dużej mocy. Umożliwia sterowanie dwoma silnikami DC lub jednym dwu fazowym silnikiem krokowym. L298N zawiera zabezpieczenie przed przegrzaniem układu. Układ akceptuje standard TTL 0-5V i nadaje się do pracy z mikrokontrolerami AVR, PIC, ARM oraz modułami Arduino. Moduł z dwukanałowym sterownikiem silników prądu stałego L298. Zasilany jest napięciem do 12 V. Układ posiada wbudowany regulator napięcia 5 V, do zasilania części logicznej.
+12V Napięcie zasilania silników do 24V.
+5V Zasilanie części
logicznej za stabilizatorem - aktywne po wyjęciu zworki 5V.
GND Masa
układu
Output A Wyjścia kanału silnika A.
Output B Wyjścia kanału silnika
B.
A enable - Sygnał PWM do sterownia prędkością obrotową silnika A.
Domyślnie podłączony do 5 V za pomocą zworki - oznacza, że silnik pracuję z
maksymalną prędkością.
B enable - Sygnał PWM do sterownia prędkością
obrotową silnika B. Domyślnie podłączony do 5 V za pomocą zworki - oznacza, że
silnik pracuję z maksymalną prędkością.
Input - Sterowanie kierunkiem
kanałów A i B
Moduł umożliwia sterowanie 2 silnikami prądu stałego lub
silnikiem krokowym o poboże prądu do 2A.
Układ oparty jest na
popularnym sterowniku L298. Układ pozwala regulować prędkość i kierunek
obrotów. Moduł z popularnym sterownikiem L298, umożliwia kontrolę kierunku
obrotów i prędkości dwóch silników prądu stałego. Dzięki złączom śrubowym
zasilanie, oraz silniki można w prosty sposób podłączyć przewody. Sygnały
sterujące zostały wyprowadzane na złącza goldpin, co pozwala łączyć układ z
płytkami uruchomieniowymi, np. z Arduino za pomocą
przewodów.
Dane techniczne:
|
Pin |
Opis |
|
+12V |
Napięcie zasilania silników. |
|
+5V |
Zasilanie części logicznej za stabilizatorem - aktywne po wyjęciu zworki 5V. |
|
GND |
Masa układu |
|
OUT1, OUT2 |
Wyjścia kanału silnika A. |
|
OUT3, OUT4 |
Wyjścia kanału silnika B. |
|
ENA |
Sygnał PWM do sterownia prędkością obrotową silnika A. Domyślnie podłączony do 5 V za pomocą zworki - oznacza, że silnik pracuję z maksymalną prędkością. |
|
IN1, IN2 |
Sterowanie kierunkiem kanału A |
|
ENB |
Sygnał PWM do sterownia prędkością obrotową silnika B. Domyślnie podłączony do 5 V za pomocą zworki - oznacza, że silnik pracuję z maksymalną prędkością. |
|
IN3, IN4 |
Sterowanie kierunkiem kanału B |
Tabela stanów sterownika L298
|
IN1 / IN3 |
IN2 / IN4 |
Wyjścia silników |
|
stan |
stan |
Silnik kręci się z maksymalną prędkością zadaną poprzez pwm (różną od 0) zgodnie ze wskazówkami zegara. |
|
stan |
stan |
Silnik kręci się z maksymalną prędkością zadaną poprzez pwm (różną od 0) przeciwnie do ruchu wskazówek zegara. |
|
stan |
stan |
Przy podaniu stanu wysokiego na wejście PWM - szybkie hamowanie silników (fast stop). |
|
stan |
stan |
Przy podaniu stanu wysokiego na wejście PWM - szybkie hamowanie silników (fast stop). |
|
stan |
stan |
Przy podaniu stanu niskiego na wejście PWM - swobodne hamowanie (soft stop). |
|
|
|
|


© ElStat Wszelkie Prawa Zastrzeżone



 61 852 65 42
61 852 65 42




 Katalog elementów
Arduino-
Katalog elementów
Arduino- 






